
ANWENDUNG
Humanoide Roboter
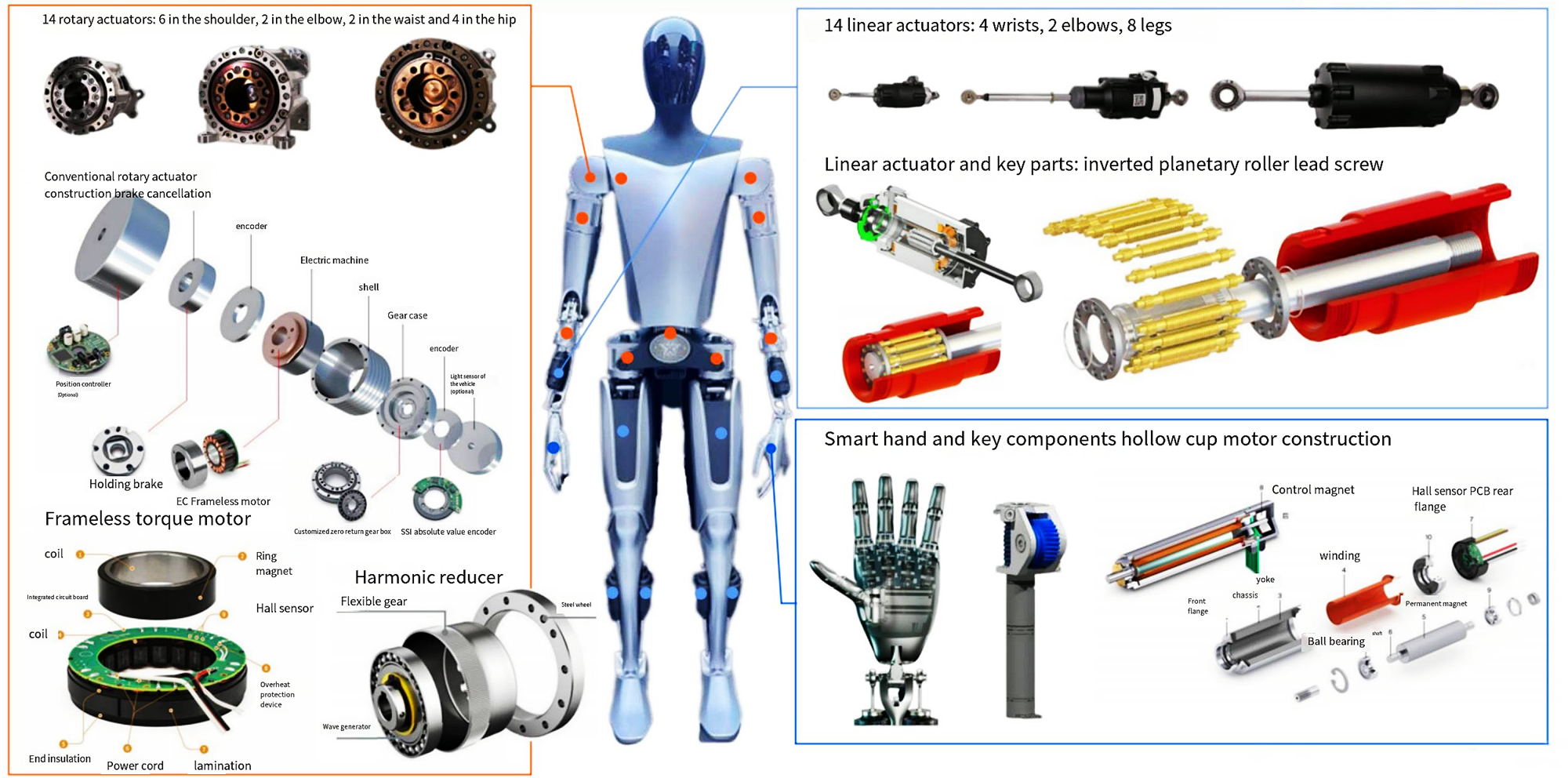
Bei humanoiden Robotern ist der Einsatz von kernlosen Motoren, rahmenlosen Drehmomentmotoren und Planetengetrieben von entscheidender Bedeutung, und sie spielen in verschiedenen Systemen und Funktionsmodulen einzigartige Rollen. Nachfolgend finden Sie ihre detaillierte Anwendungsbeschreibung:
Kernlose Motoren werden aufgrund ihrer hohen Effizienz und schnellen Reaktion häufig in humanoiden Robotern eingesetzt, insbesondere wenn eine hohe Präzision und Hochgeschwindigkeitssteuerung erforderlich ist.
Rahmenlose Drehmomentmotoren werden aufgrund ihrer Vorteile eines hohen Drehmoments bei niedriger Drehzahl und großer Drehmomentabgabe häufig in Roboterteilen eingesetzt, die ein hohes Drehmoment und viel Stabilität erfordern.
Planetengetriebe verbessern die Ausgangsleistung von Motoren durch Erhöhung des Drehmoments und Reduzierung der Drehzahl und werden in Mehrfachbewegungssystemen von Robotern eingesetzt.
Anwendungen
Roboterarm:
Das Handgelenk nutzt einen kernlosen Motor, um schnelle und flexible Bewegungen zu erreichen, ein rahmenloser Drehmomentmotor sorgt für den Schulterantrieb und ein starkes Drehmoment und ein Planetengetriebe erhöht die gesamte Drehmomentabgabe an jedem Gelenk.
Bionische Beine:
Die Hüft- und Kniegelenke nutzen rahmenlose Drehmomentmotoren, um eine hohe Belastbarkeit zu erreichen, und Planetengetriebe sorgen für präzise Verzögerungs- und Drehmomenterhöhungsfunktionen.
Durch die Koordination dieser Antriebstechnologien können humanoide Roboter komplexe Aktionen, fließende Bewegungen und hocheffiziente Operationen ausführen. Dies fördert die breite Anwendung humanoider Roboter in verschiedenen Bereichen, darunter in der industriellen Automatisierung, als Serviceroboter und in der medizinischen Versorgung.

Schreiben Sie uns
*Wir respektieren Ihre Vertraulichkeit und alle Informationen sind geschützt.